- KG-enhanced scene representation — a Knowledge Graph encoding not only spatial structure but also traffic rules, class hierarchies, commonsense context, and scenario-specific rdfs:comment descriptions, enabling structured dilemma reasoning beyond what 3DSGs provide.
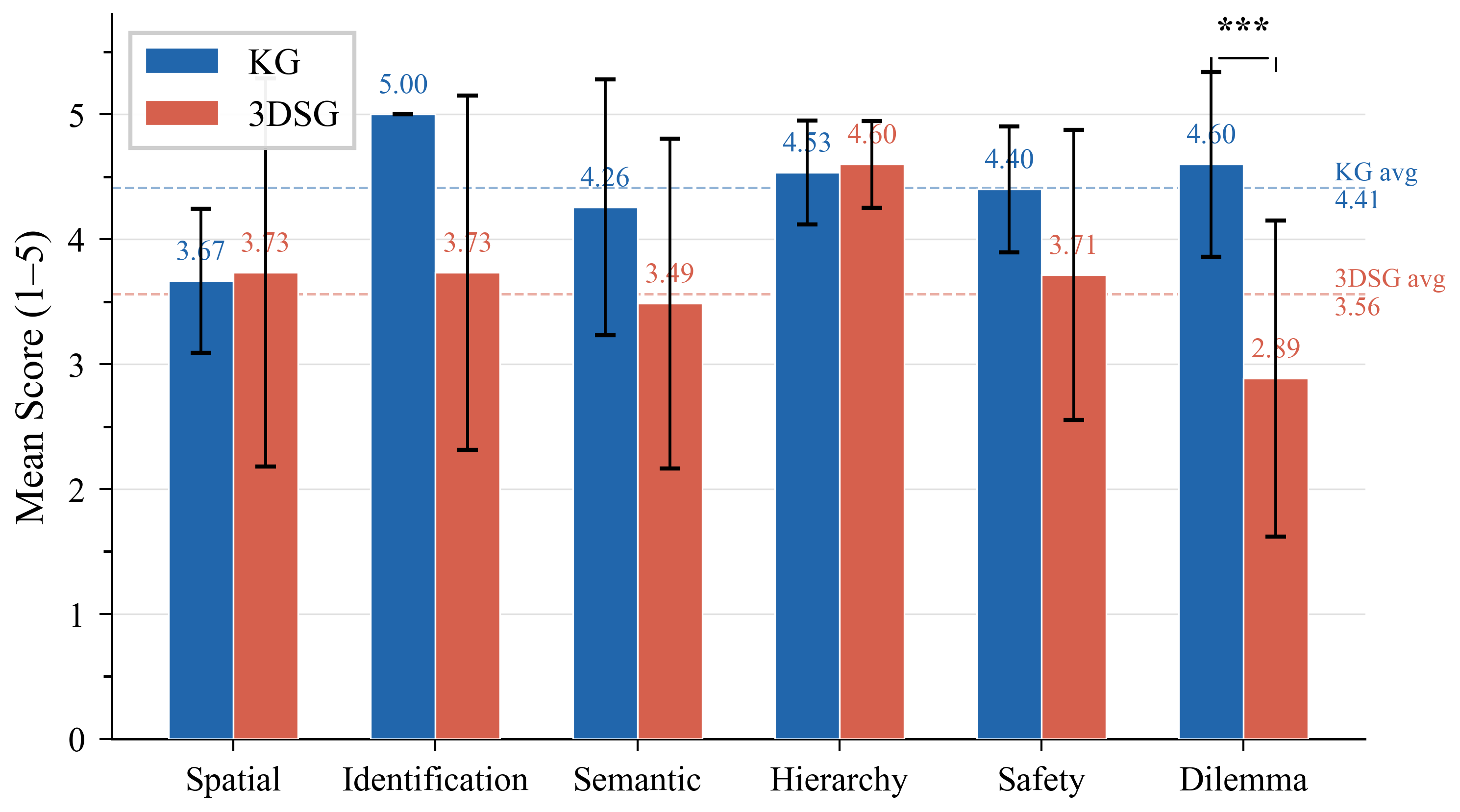
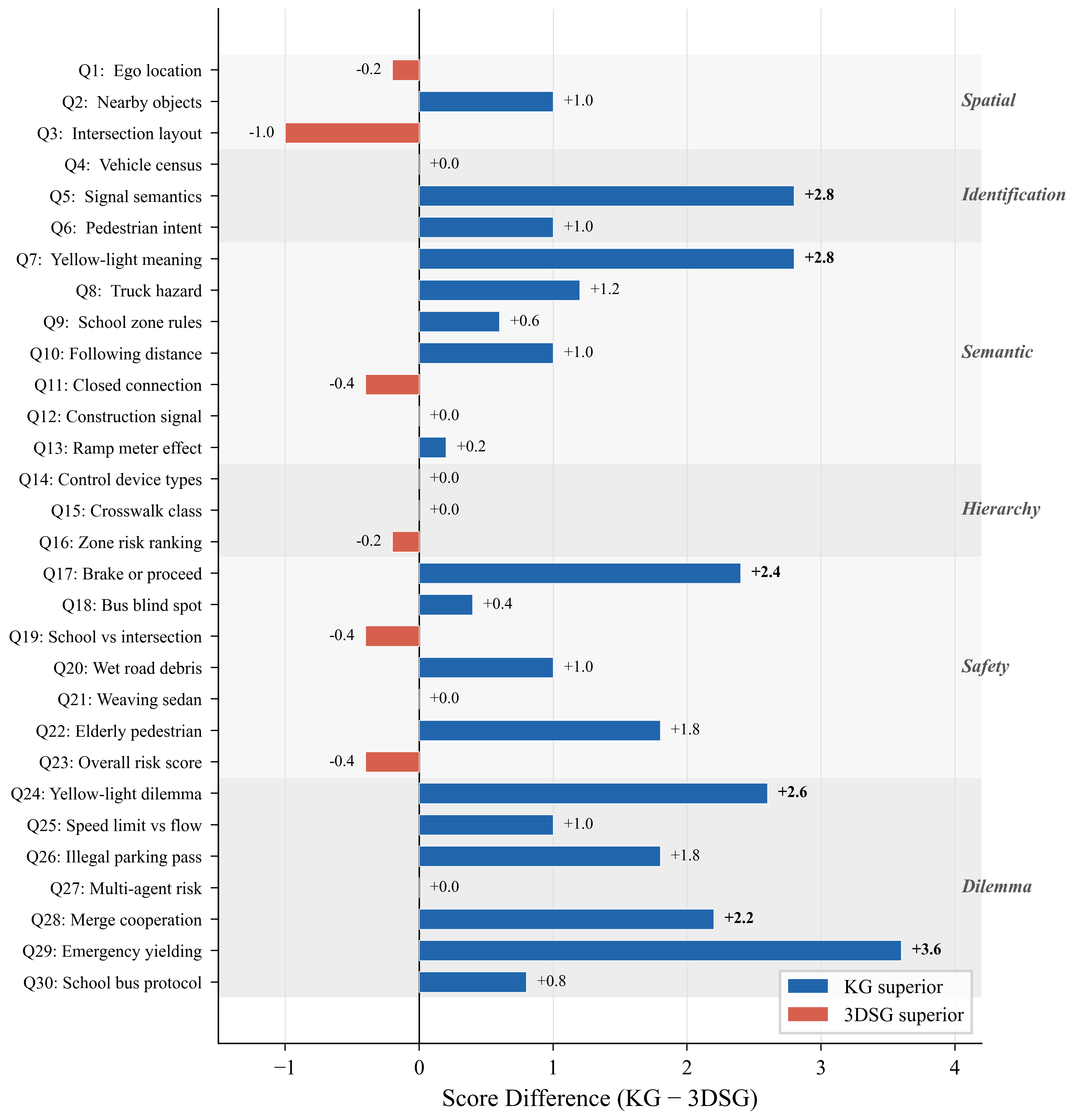
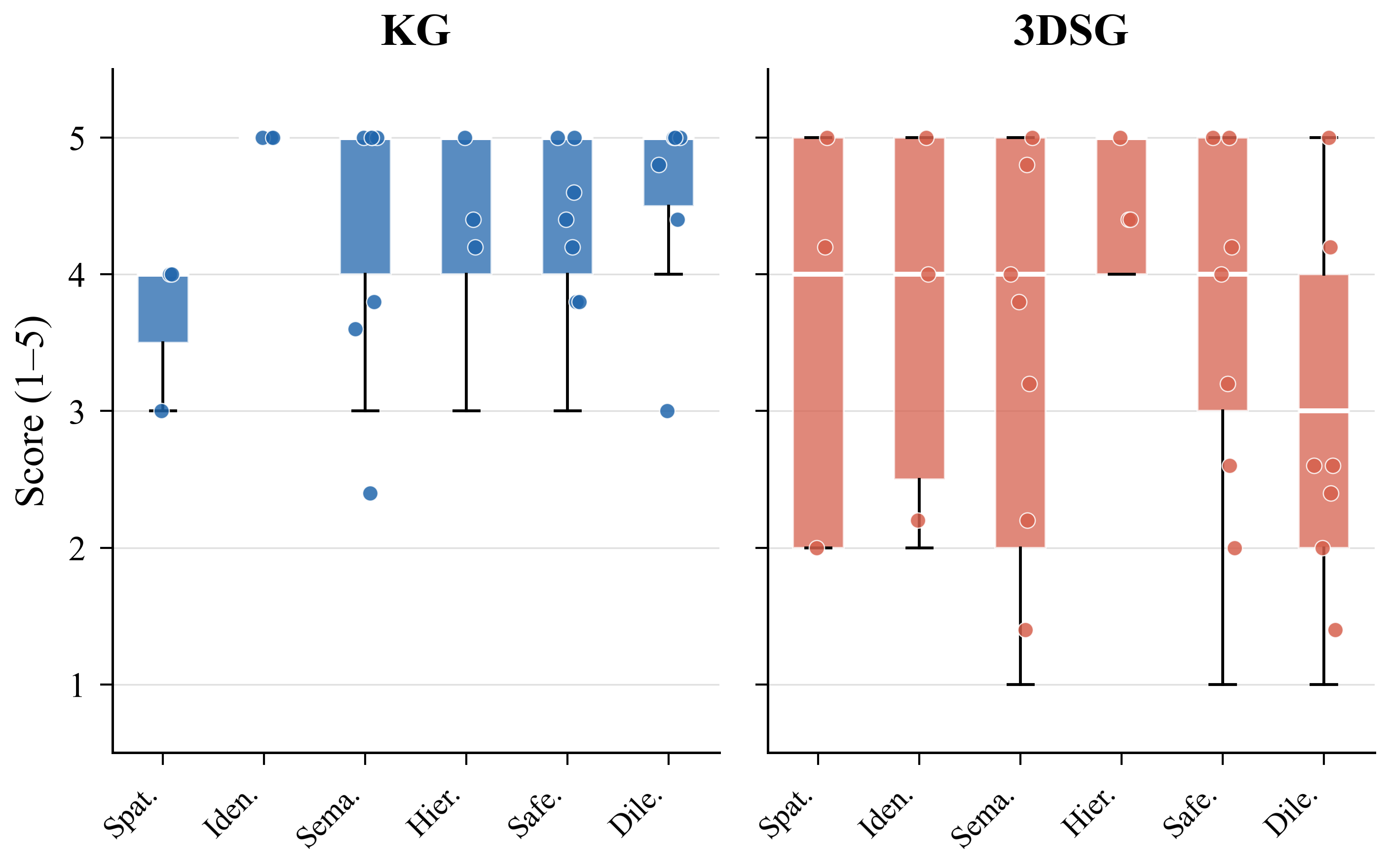
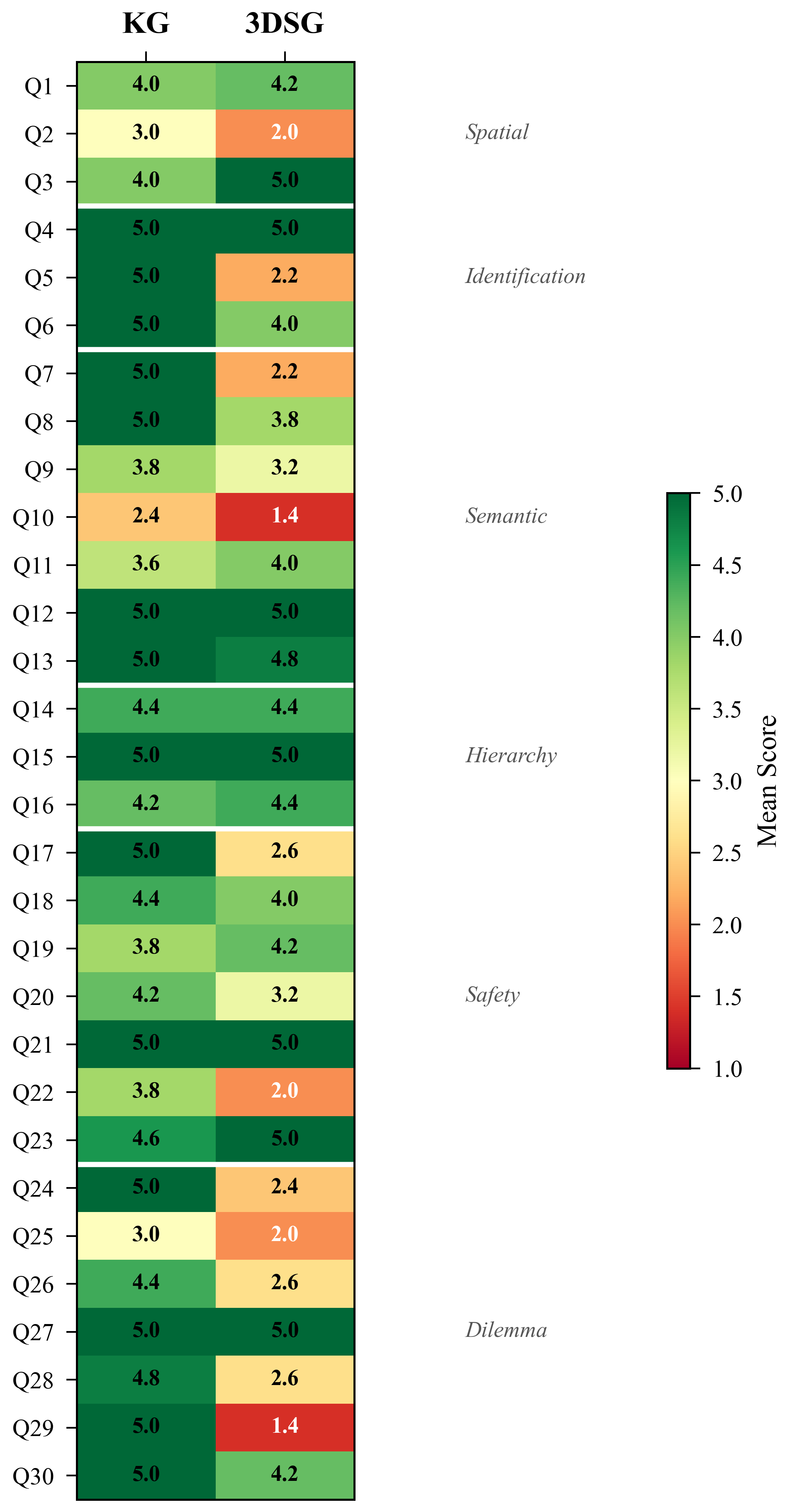
- Controlled LLM-as-judge evaluation — 30 scene-understanding queries across 6 cognitive categories, evaluated N=300 times (GPT-4o-mini answering / GPT-4o judging), yielding statistically rigorous comparisons with Wilcoxon signed-rank test and effect size reporting.
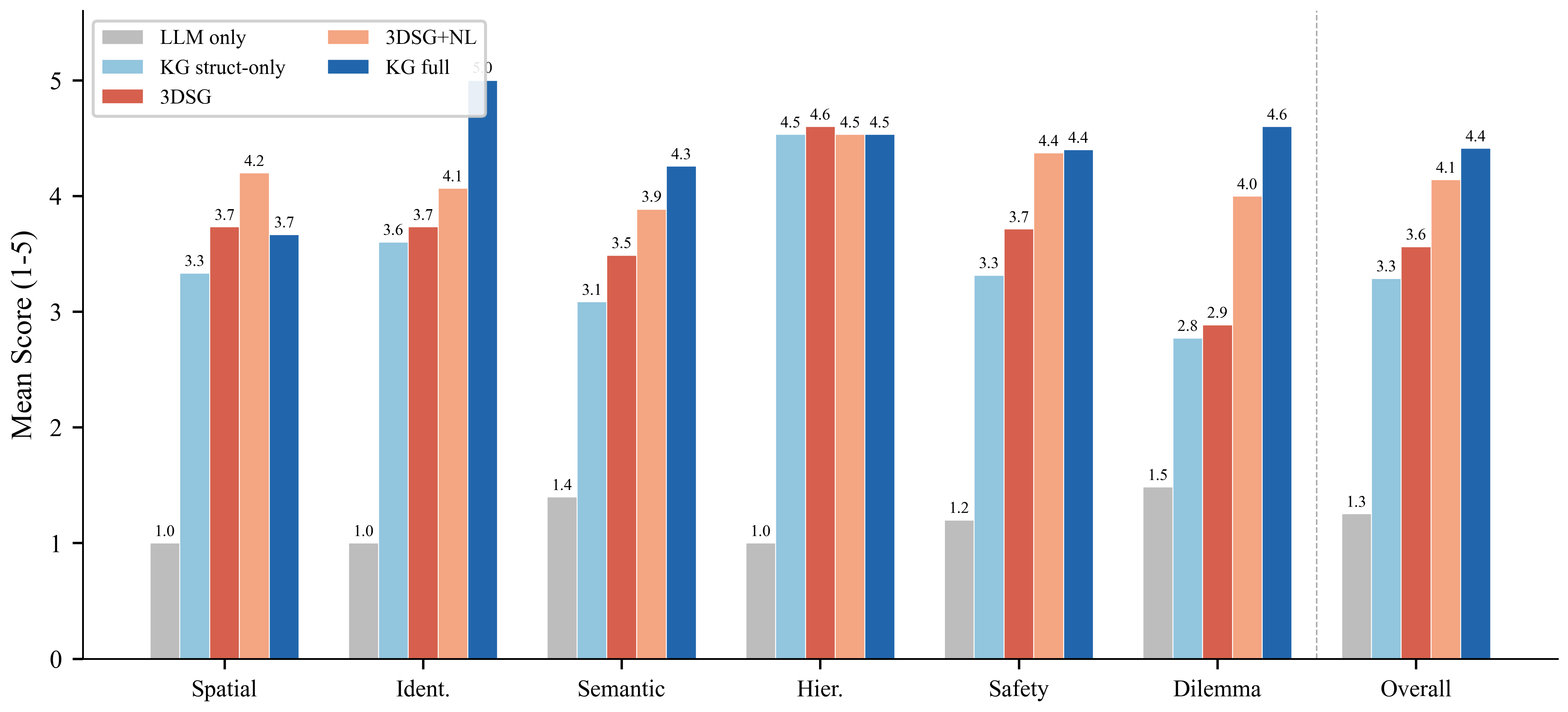
- Large performance gain on dilemma reasoning — KG significantly outperforms 3DSG baseline (mean 0.00 vs. 3.56, p<0.001, Cohen's d=0.84), with the largest gain in dilemma-specific queries (+1.71).
- 5-condition ablation revealing the key driver — systematic ablation (LLM-only → KG-structure → 3DSG → 3DSG+NL → KG full) isolates natural-language rdfs:comment descriptions as the dominant contributor, not ontological structure alone.
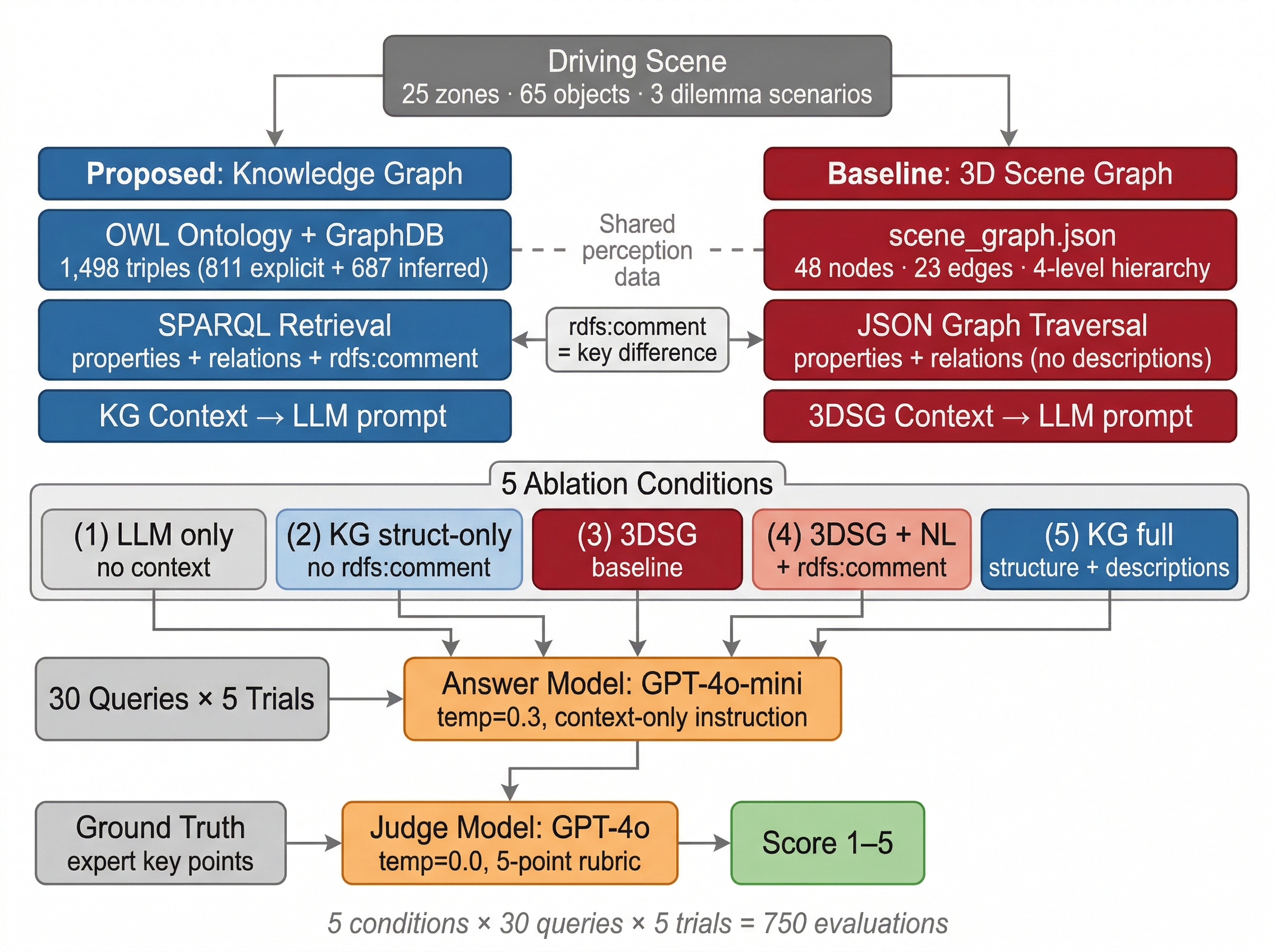
The proposed KG-enhanced semantic scene understanding framework. Given a scene, the KG represents objects, traffic rules, class hierarchies, and scenario-specific semantic descriptions, enabling richer dilemma reasoning than 3D Scene Graphs.